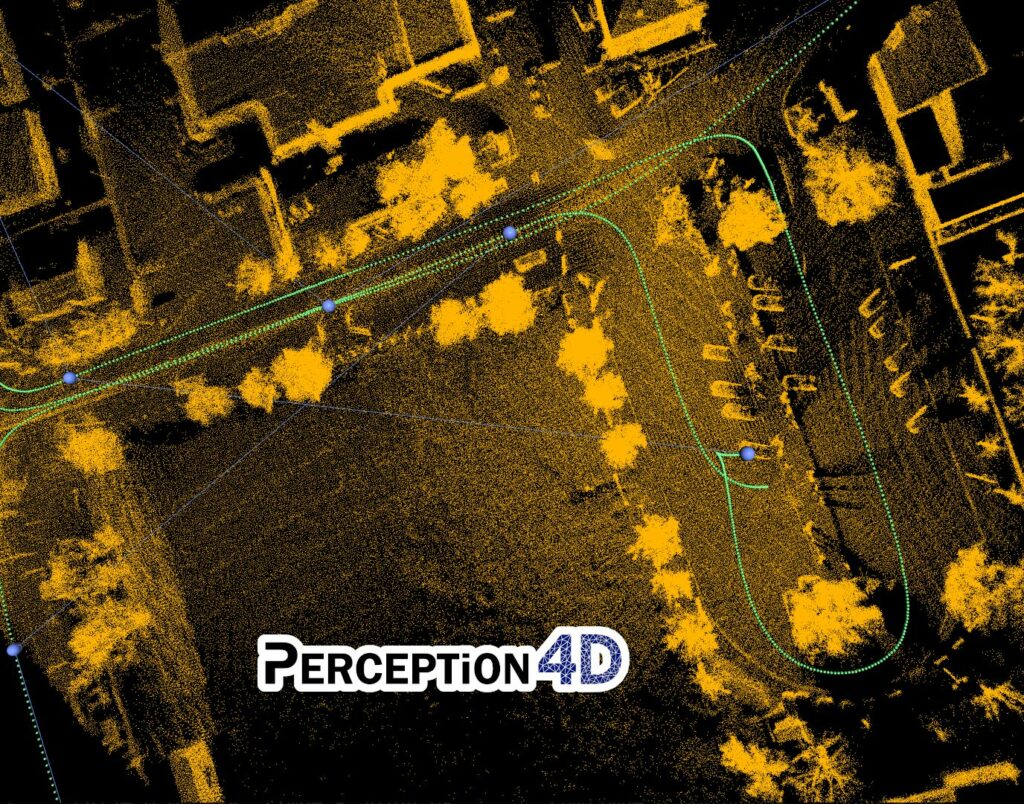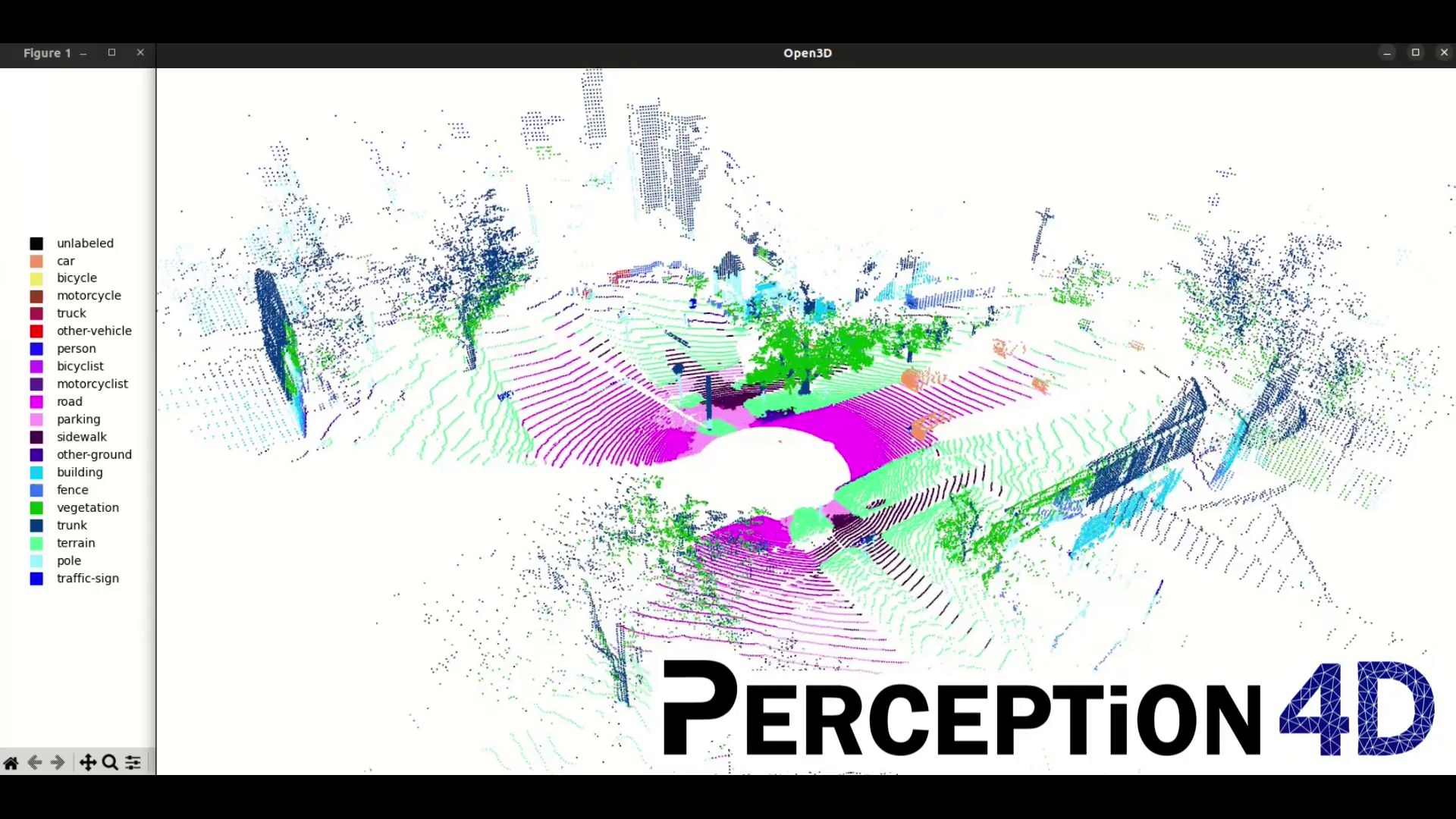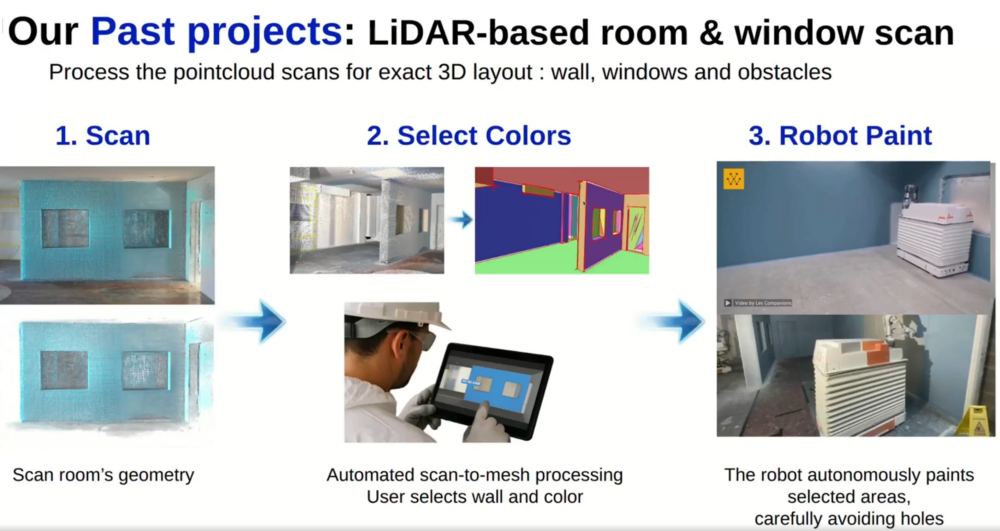
From raw LiDAR scan to paintable walls in seconds — onsite
🎨🤖 #PACO (Les Companions‘ autonomous painting robot) cuts painting time by easily getting instructions, from the technician onsite.
The process looks simple:
1️⃣ Scan ⇒ 2️⃣ Decide ⇒ 3️⃣ Let Paco Paint
But lots happens under the hood to make it “simple” by extracting:
🧱 consistent wall surfaces
📐 clean geometric boundaries
🪟 window and door openings
🚫 exclusion zones (holes, obstacles, protected areas)
📏 stable, bounded entities usable for planning
This requires:
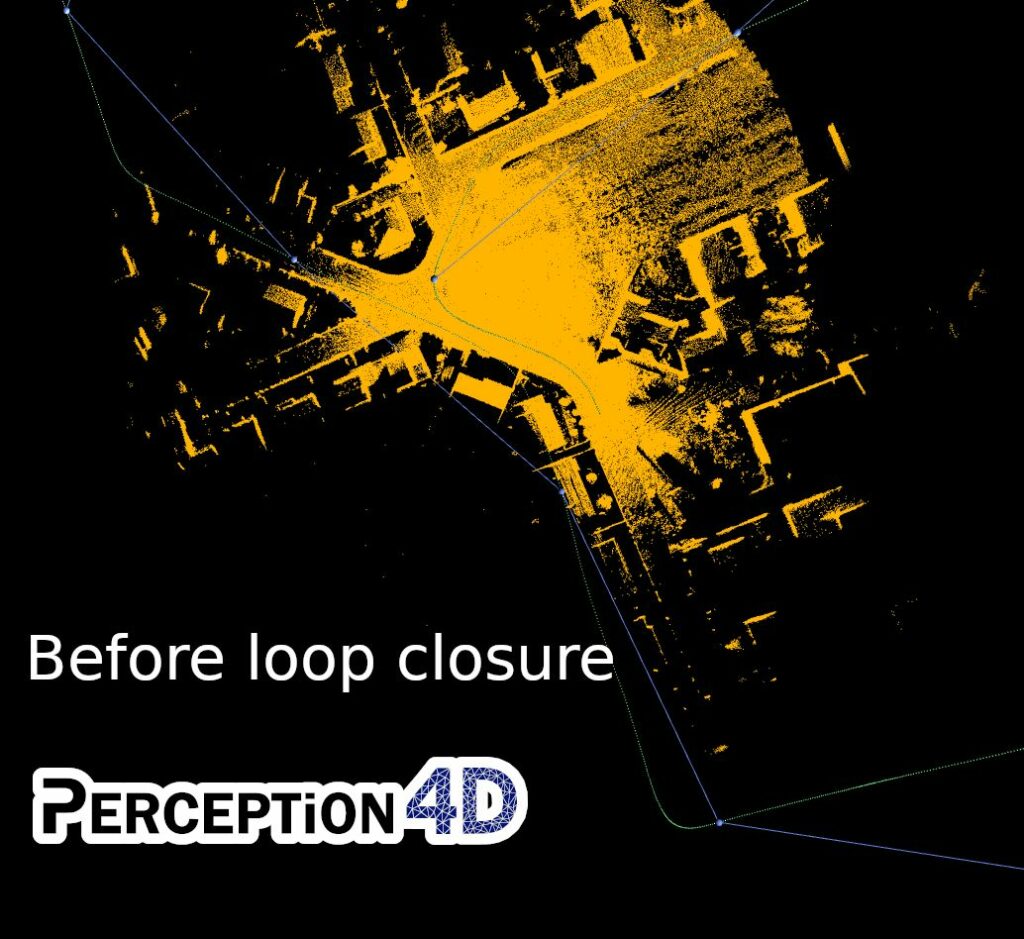
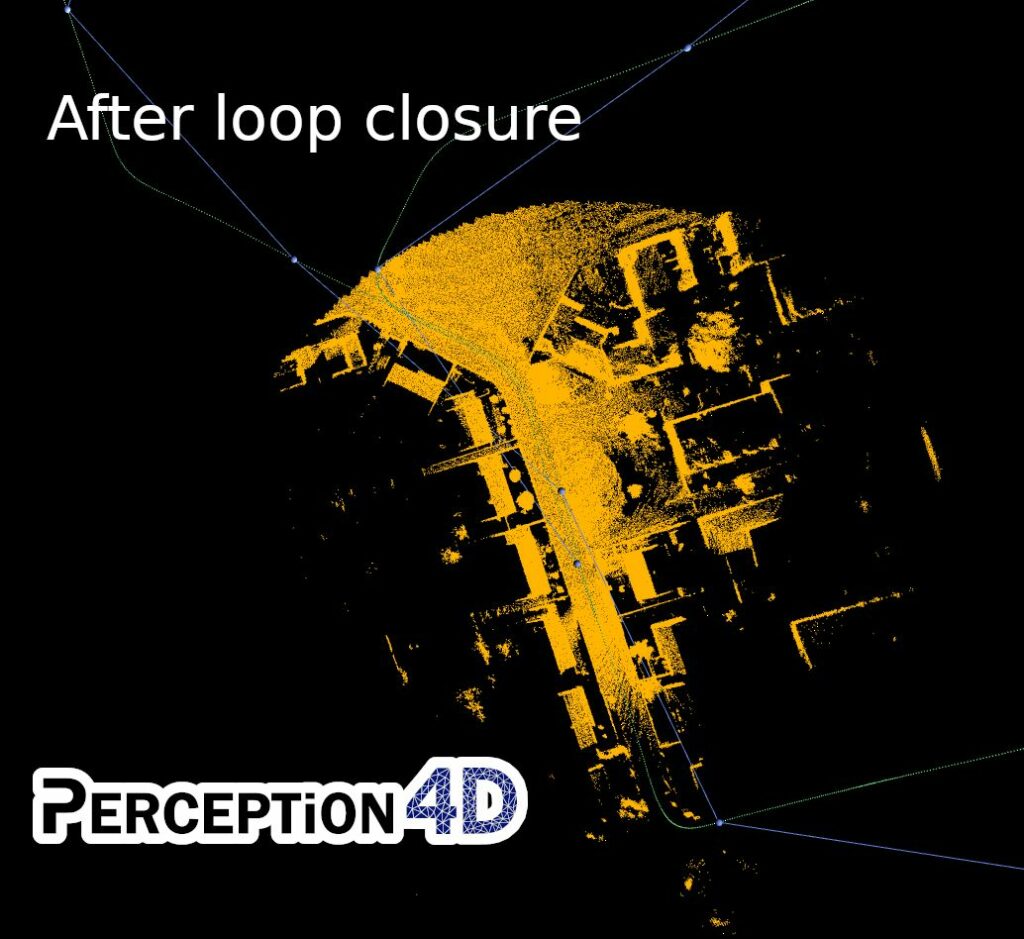
📍 LiDAR-based SLAM for coherent spatial reference
🧩 fast & robust planar segmentation under real-site noise
🔗 plane merging and topology reasoning
✂️ constraint-aware boundary extraction
Today:
🏗️ 8 real deployments
🎨 15,000+ m² painted autonomously
🏆 France2030 Automated Machine award
Turning raw 3D points into geometry a robot can act on — and watching it perform on real walls — is deeply satisfying.
Raw 3D data in. Real-world action out. That’s Perception4D.
#LiDAR #SLAM #3DPerception #Robotics #ConstructionTech