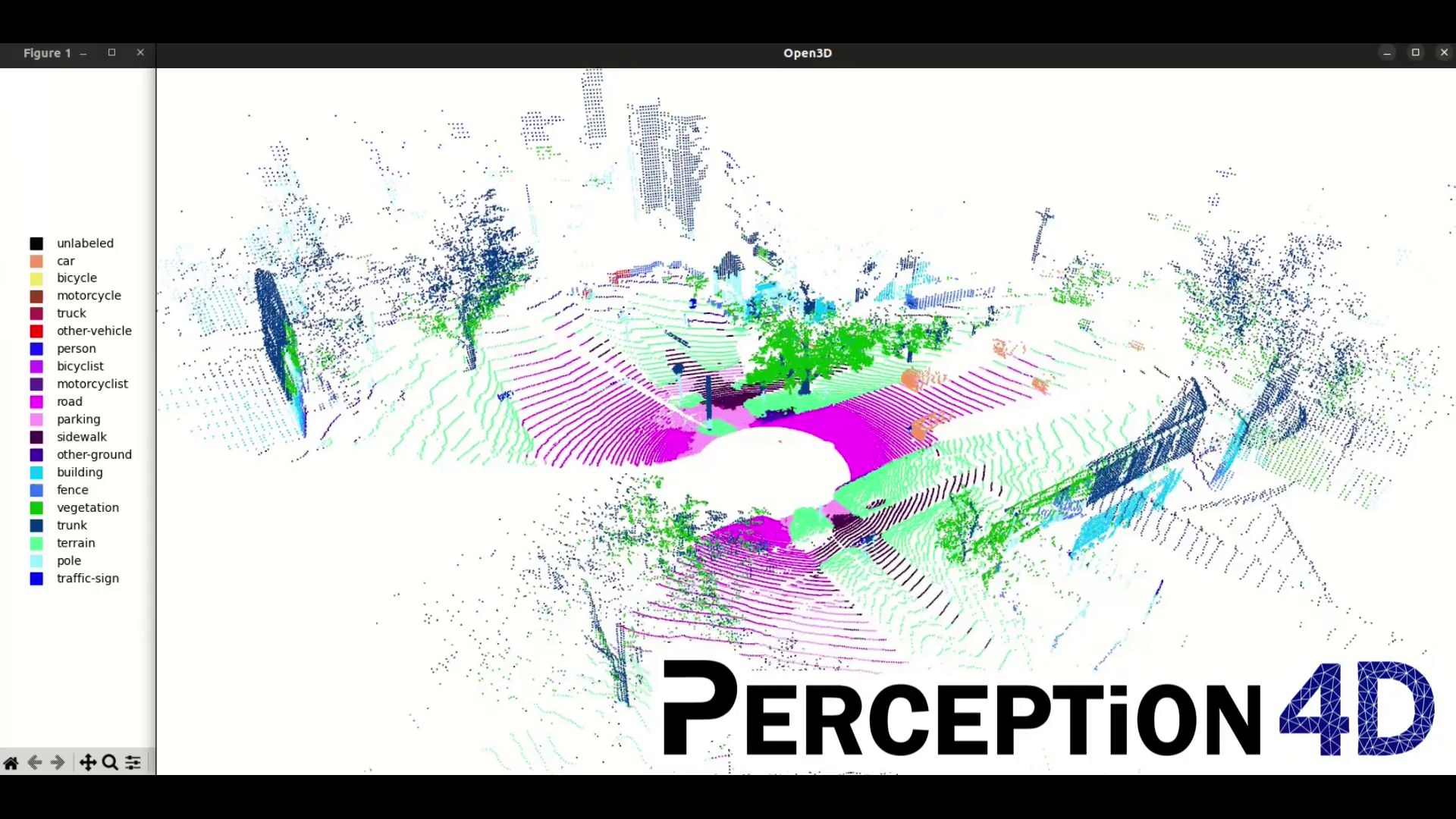
Point Cloud Segmentation
🚀 A glimpse into a building block of a bigger project: Lidar point cloud segmentation, with only 3D points a Ouster OS1-128 Lidar.
🚗That’s the daily task of Autonomous Vehicles, and Perception4D applies to many other usages
🤖 Benchmarking and Retraining Deep Learning networks on inhouse data, from old-ish RandLanet PointPillars to KPConv and SuperPoint Transformer
💻 The direct usage goes from cleaning the scanned point cloud to computing road surface or cable length. And that’s a building brick for other projects.
🤝A huge thanks to Youssef OUCHOUID who work on this during his end of study internship supervised by Manon Cortial-Picard & Bastien Jacquet