We just learnt that the ICRA 2022 paper “CT-ICP: Real-Time Elastic LiDAR Odometry with Loop Closure” by Pierre Dellenbach, Jean-Emmanuel Deschaud, Bastien Jacquet, François Goulette has been selected as one of three finalists for the ICRA 2022 Outstanding paper awards!
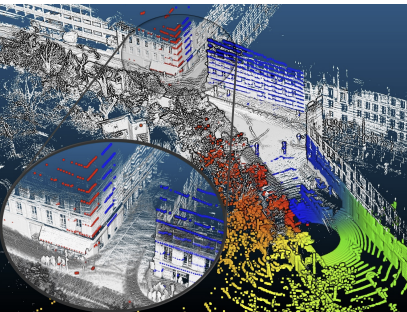
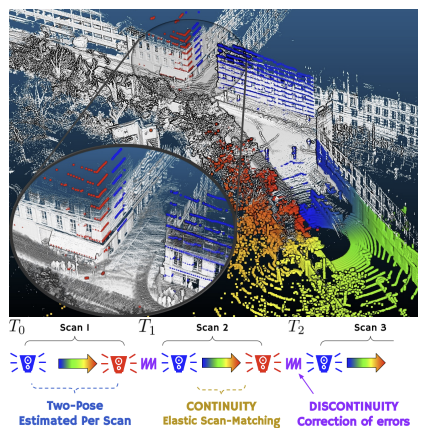
Fig. 1: Top, in color, one LiDAR scan; the color depends on the timestamp of each point (from the oldest in blue to newestin red). The scan is deformed elastically to align with the map (white points) by the joint optimization of two poses at the start and end of the scan and interpolation according to the timestamp, hence creating a continuous-time scan-to-map odometry. Below, the formulation of our trajectory with a continuity of poses intra-scan and discontinuity between scans.
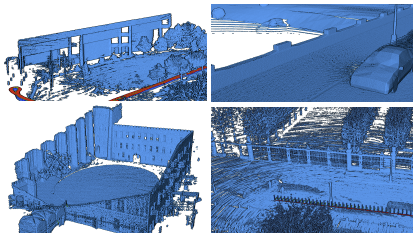
Fig. 2: Aggregated point clouds for NCLT dataset (top left), KITTI-CARLA (top-right), Newer College Dataset (bottom left), and ParisLuco (bottom right) show the quality of the maps obtained with CT-ICP.
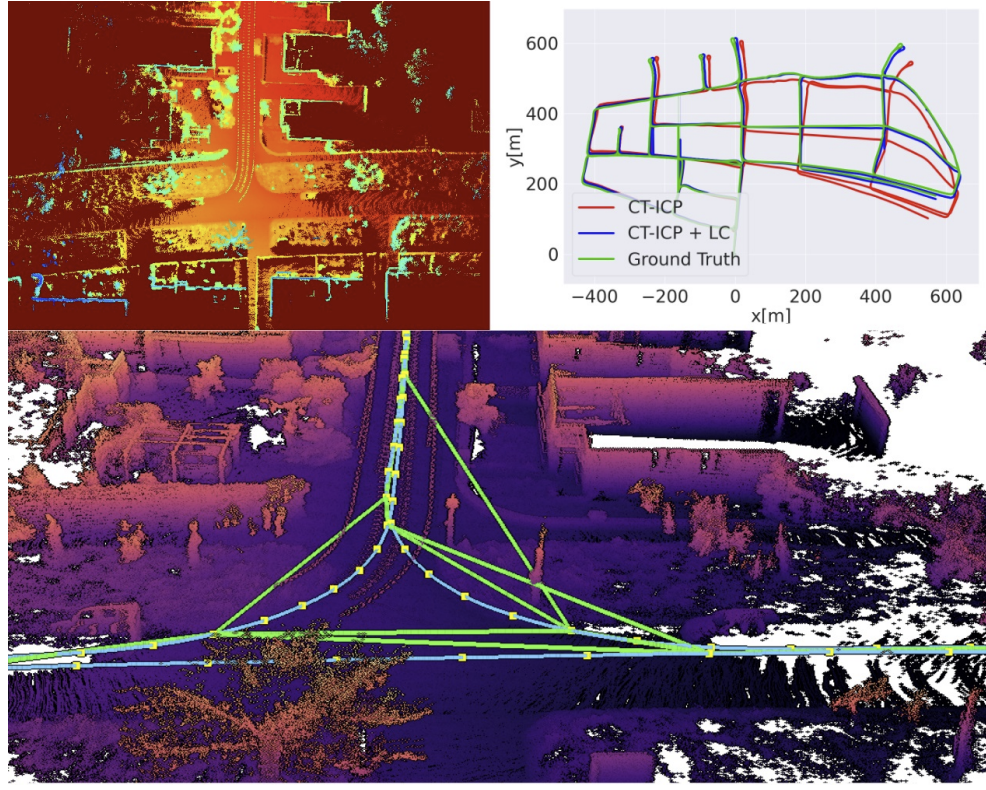
Fig. 4: Qualitative results of loop closure on the sequence 00 of KITTI-360 (11501 scans). The top left is an elevation image built by projecting the local map. The top right shows both the CT-ICP odometry’s trajectory and the one corrected using the computed Loop Closure constraints (CT-ICP+LC). The bottom shows the different loop closure constraints (green) found for the same turn as the local map at the top left.
Contributions:
• New elastic LIDAR odometry based on the continuity of poses intra-scan and discontinuity between scans.
• Local map based on a dense point cloud stored in a sparse voxel structure to obtain real-time processing speed.
• Large campaign of experiments on 7 datasets in driving and high-frequency motion scenarios, all reproducible with public and permissive open-source code (C++ & Python bindings).
• Fast method of loop detection integrated with a pose graph back-end to build a complete SLAM, integrated into pyLiDAR-SLAM.
Congrats to Pierre Dellenbach, Jean-Emmanuel Deschaud, Bastien Jacquet, François Goulette !
(And especially the first two for the hand-on coding sessions over the summer 🙂 )
You can download the full article on arXiv and HAL.