Testing KISS-SLAM
At Perception4D, staying at the forefront of 3D LiDAR expertise means keeping a close eye on the latest research in the field
Just two days ago, the team at #StachnissLab introduced KISS-SLAM, their latest #SLAM algorithm, claiming it requires no parameter tuning.
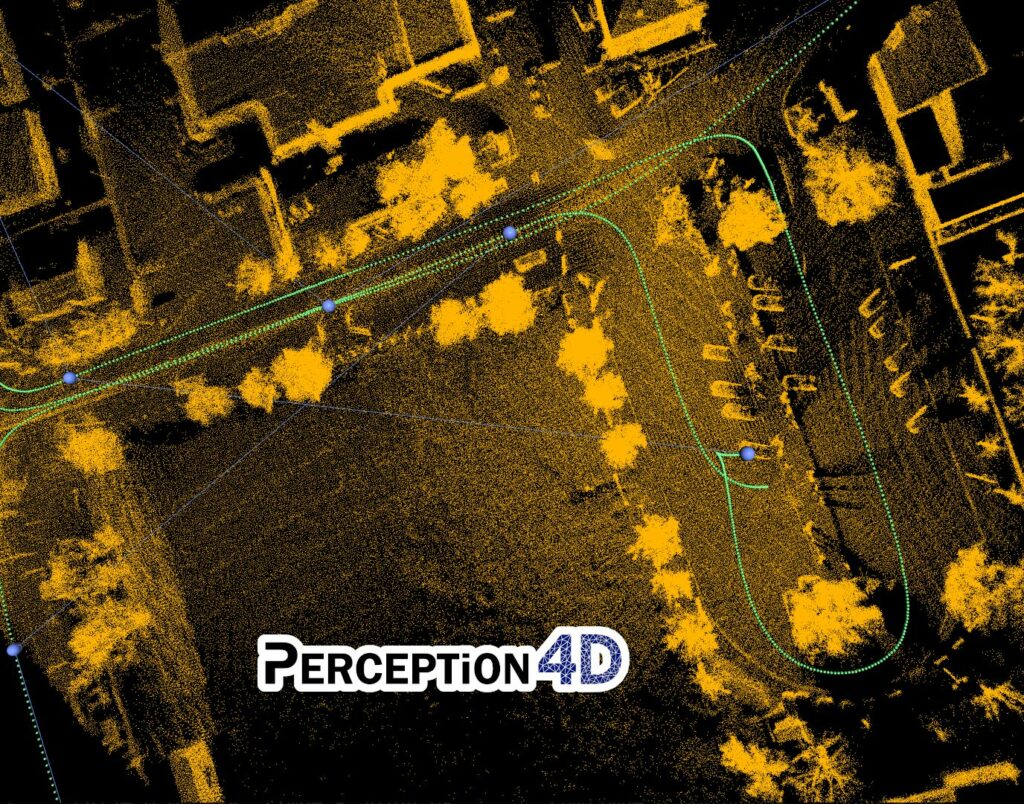
We had just acquired a new 5km urban dataset, featuring narrow streets and steep slopes—the perfect test for KISS-SLAM.
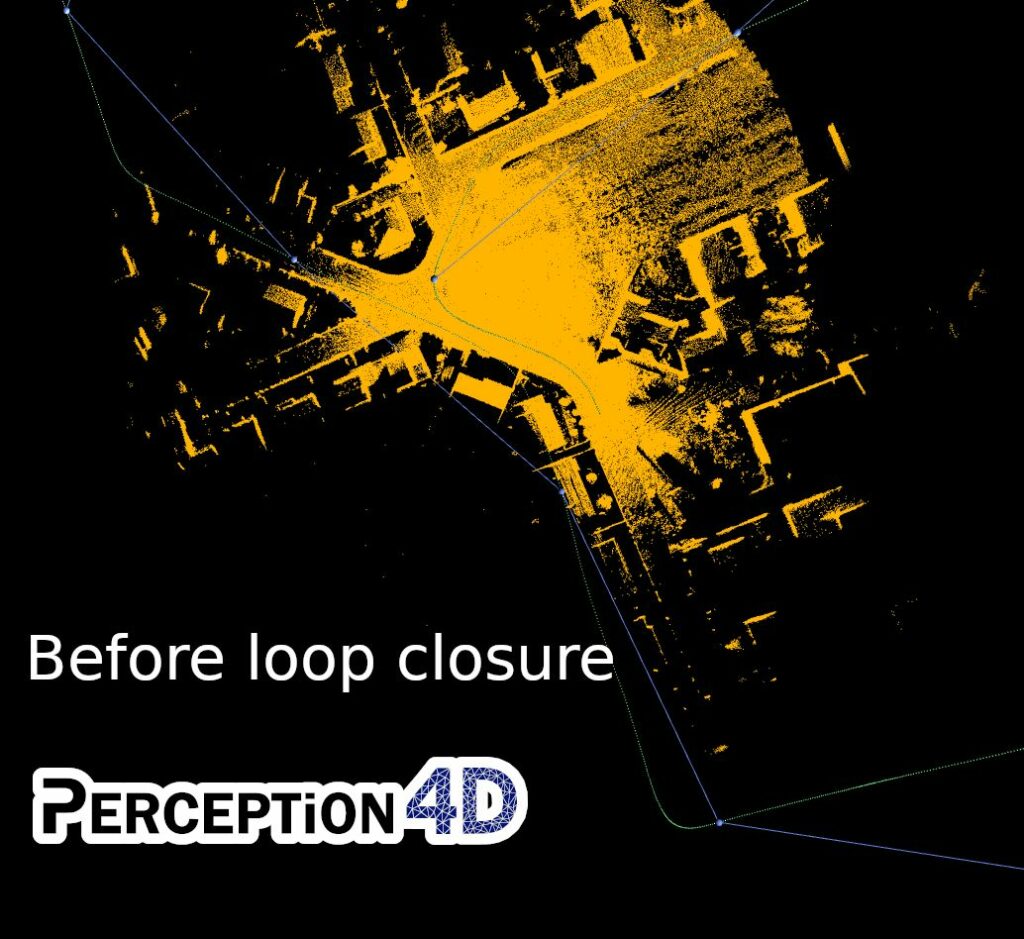
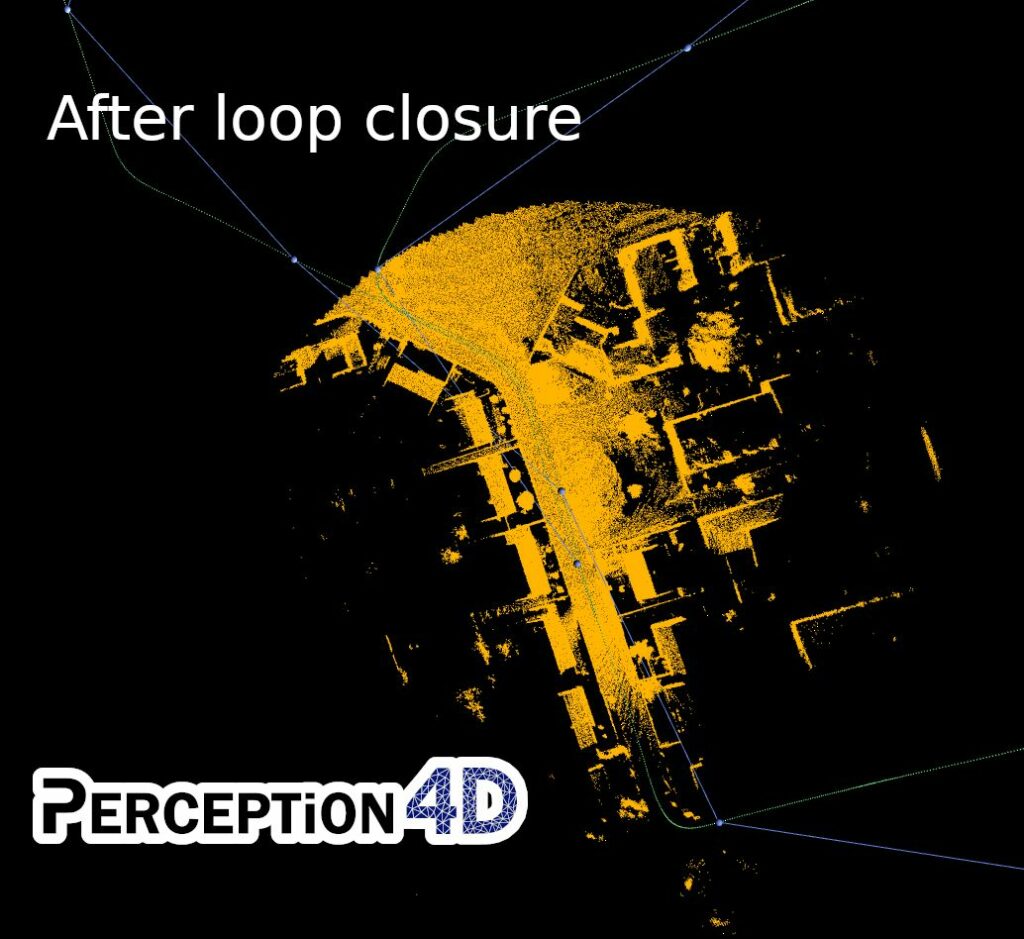
The results? Outstanding! The algorithm successfully detected all necessary loop closures and produced a clean, accurate trajectory. Impressive work from the team! 👏
🚀 Need expert guidance or custom development for your #3D #LiDAR project? At Perception4D, we provide tailor-made solutions for SLAM, object detection, and 3D point cloud visualization & simulation.
📩 Contact us! → https://lnkd.in/dUAMsAtW
#SLAM #KISSSLAM #Perception4D #LiDAR #3DMapping #Robotics #Innovation #PointCloud #3D